F-LOAM 论文阅读
F-LOAM
一、介绍
F-LOAM : Fast LiDAR Odometry and Mappin
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
论文下载地址:https://arxiv.org/pdf/2107.00822.pdf
代码地址:https://github.com/wh200720041/floam
今天介绍的F-LOAM是新加坡南洋理工大学的王晗(Wang Han)博士的工作,论文发表于2020年的IROS,代码开源于他的github主页。
这个工作本质上是A-LOAM的进一步整理,技术方法上基本没有太大变化,重点在于代码架构上的进一步优化,使系统的运行效率有了显著地提升。
与LeGO-LOAM相比
上期文章介绍了F-LOAM,它重点针对LOAM计算效率问题进行了优化,旨在不影响精度的情况下尽量缩减其对平台算力的需求,使之能够轻量化地部署于算力有限的无人平台上(例如:无人机、移动机器人等)。F-LOAM所采用的优化思路是舍弃LOAM中不必要的las ...

Hello World
Welcome to Hexo! This is your very first post. Check documentation for more info. If you get any problems when using Hexo, you can find the answer in troubleshooting or you can ask me on GitHub.
Quick Start
Create a new post
1$ hexo new "My New Post"
More info: Writing
Run server
1$ hexo server
More info: Server
Generate static files
1$ hexo generate
More info: Generating
Deploy to remote sites
1$ hexo deploy
More info: Deployment
LeGO-LOAM 论文阅读
LeGO-LOAM
一、介绍
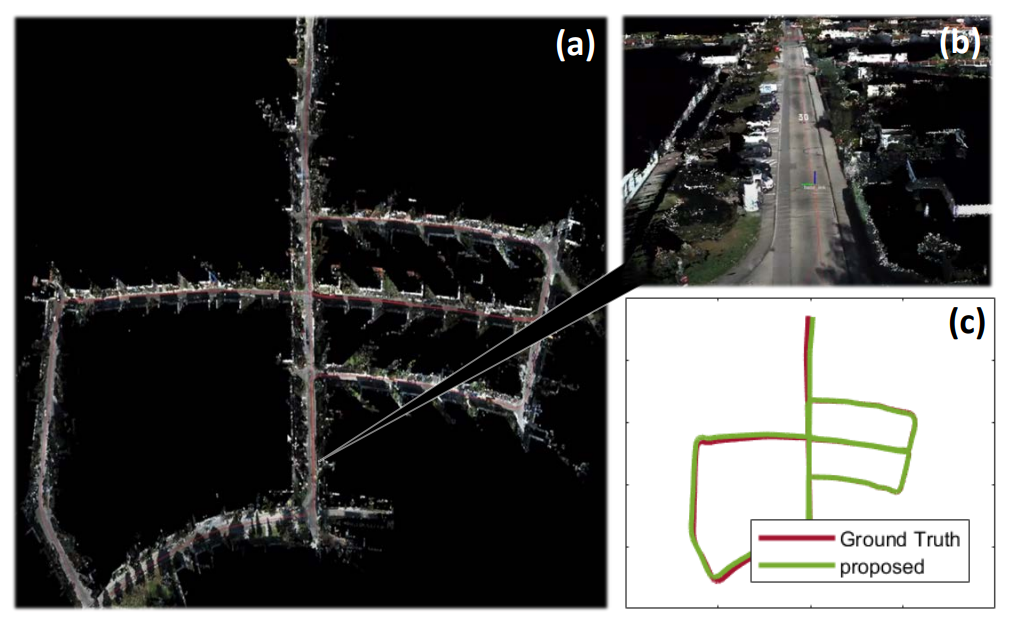
LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain
2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
论文:该工作由Shan Tixiao完成,论文LeGO-LOAM: Lightweight and Ground-Optimized LiDAR Odometry and Mapping on Variance Terrain发表于2018年IROS会议,
代码:代码源生于LOAM的原始版本,开源于RobustFieldAutonomyLab/LeGO-LOAM,优化版本的代码见facontidavide/LeGO-LOAM-BOR。
123T. Shan and B. Englot, “Lego-loam: Lightweight and groundoptimized lidar odometry and map ...
LOAM 论文阅读
LOAM
一、介绍
LOAM: Lidar Odometry and Mapping in Real-time
2014, Robotics: Science and Systems
论文下载地址:http://www.roboticsproceedings.org/rss10/p07.pdf
LOAM的参考代码链接:
A-LOAM
A-LOAM-Notes
LOAM-notes
概述:该论文是Lidar 3D SLAM的经典之作,一直以来都霸占着 KITTI 的前列。作者另辟蹊径将复杂的 SLAM 问题分为:1. 高频的运动估计; 2. 低频的环境建图,巧妙地解决了实时性的难题。近些年来,依靠 LOAM 框架也产出了很多文章,理解了 LOAM,就可以很好的理解 LOAM 系列的其他文章。
1J. Zhang and S. Singh, “Loam: Lidar odometry and mapping in realtime.” in Robotics: Science and Systems, vol. 2, no. 9, 2014.
二、总结
作者设计实现了两组算法。一组是: ...